In a prior post (here), I discussed whether we should pay attention to the Classical Economists who wrote in the Nineteenth Century. They had brilliant insights but they lacked the statistical tools to test their ideas. Now that we have the tools and the historical data, there is no reason not to test and extend their ideas. One of the problems is figuring out what the Classics actually meant because their writing was verbose, obscure and difficult for modern readers to wade through.
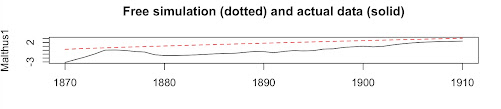
Benjamin Higgins (1968) (here) has come to our rescue with a book (now out of print but still available used here) that develops a generalized mathematical model of economic development based on the classics (see Chapter 3). He presents eight structural equations (p. 63) and a time plot of the relationship between N (Population) and Q (GDP), above. His Figure 2-3 (above) looks very similar to the time series plot for the German 19th Century model (DEL19) at the beginning of this post which was based on an estimated dynamic state space model. The DEL19 model used the same variables identified by Higgins but did not arrive at the time plot using Higgins classical structural equations. Understanding how the DEL19 model was constructed will help me explain how to approach the Classics with modern tools.

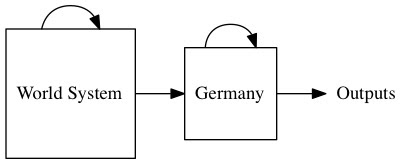
Higgins identifies the following variables as central to the general Classical model: Production (Q), Labor (L), Capital (K), Wages (W), Profits (R), Investment (I) and Technology (T). Variables can be further grouped (using Systems Theory) as system output state O=(L,Q,T), Endogenous (W,R,I), Exogenous (N) and Output (K) yielding the directed graph above (Higgins actual structural equations are presented below in the Notes--the endogenous variables can be reduced out of the equation system).
To Neoclassical Economists, the directed graph will look strange. Technology is usually taken as exogenous and the Capital stock would be included in the system state. But the Classics believed that Technology had to be embedded within investments and the Capital stock. Also, I think some Outputs are missing from Higgin's model (what happened to Adam Smith's Free Market? What happened to Democracy?) but I'll pick up the issue in a future post on the way to dealing with Liberalism and Neoliberalism.
The Classics also struggled with definitional issues. Did Capital include land, machines, buildings, knowledge, etc.? Were wages driven to subsistence in order to increase profits (R = Q - wL) where w is the subsistence wage. How to define Technology (T)? So many questions, so much speculation, so little testing.
Systems Theory avoids these arguments by defining the System State, S = S(Q,L,K,W,R,I,T), as being a function of all the essential variables in a system. The problem then is to estimate a state variable index and other independent indexes that describe Error Correcting Controllers (ECCs) for the system, that is, describe growth and control as two separate issues that have to be estimated separately for the system--allowing that the system might not be under adequate control.

The Measurement Matrix for the DEL19 state space model is presented above (for the moment, I am assuming that T is exogenous, but I'll pick up the issue in a future post). The first state variable, Classic1, describes overall growth (it's time plot is displayed at the beginning of this post). The second state variable, Classic2 = (0.86 N - 0.48 I), involves monitoring population growth relative to investment. The third state variable, Classic3 = (0.73 I - 0.47 L), involves monitoring investment relative to employment. The first three state variables explain over 99% of the variation in the indicators. The remaining three indicators deal mostly with wage controllers and explain little variance.
There are a number of interesting points about the estimated Measurement Matrix (estimated with Principal Components Analysis), The classics were very interested in Wages and Investment. But, they were also interested in the Capital Stock, K, and it played little role other than as an indicator of system growth in Germany (even though the Nineteenth and Twentieth Centuries are labeled as Capitalist--see below for more discussion in the Notes).
In terms of system behavior, the steady state depicted in the DEL19 Time plot was not the result of the DEL19 BAU model but required input from the World System (see the directed graph above). Understanding that every economy is embedded within the World-System had to wait for the development of World-Systems Theory at the end of the Twentieth Century and the development of Hierarchical Control Systems in the 21st Century.
You can run both versions (unstable and stable) of the DEL19 Classic model here.
Summary
What can we learn from a Classical Model of German Development?
- It is not easy to just speculate and try to understand Complex Systems. The systems are Black Boxes that only reveal their behavior by observing inputs and outputs.
- Higgins Classical model (see below) is static whereas writers such as William Baumol (1960) thought the primary attribute of Classical Models were their "Magnificent Dynamics" (download pdf here).
- The Classics were willing to go ahead and speculate without clearly defining their essential variables, for example, Capital and Technology.
- The policy recommendations derived from Classical Models (Population control, Free Markets, Free Trade, Steady States, etc.) were advanced from weak foundations.
- The Classics did not advance ideas about how the Economic System is controlled, aside from free markets. In Germany, the Classical Economy was mostly controlled by Investment relative to population and employment. These two Error Correcting Controllers might be implicit in Classical reasoning but had to wait until a reinterpretation by Systems Theory in the Twentieth Century.
- The concept of the Steady State was dropped in favor of unlimited growth by Neoclassical Economics, but has been revitalized by Ecological Economics. Unfortunately, it is a state that might only be observe in the Future, and the Future is unknowable.
- Linkage to the World System is an important part of German development in the Late Nineteenth Century. Had the link been pursued, rather than World Domination, Germany would have become a stable society in the 20th and 21at Centuries. It would not have pursued the World Wars and the Great Depression would probably not have happened. However, there was no role for the World System in either Classical Economics or Neoclassical economics. World-Systems Theory was based in Classical Marxian Economics but borrowed freely from Neoclassical Economics when needed. There is more work to do in expanding the economic underpinnings of World-Systems Theory and Classical Economics is a good place to start.
Notes
Higgins (1968: 57) defines his Classical Economic System using structural-functional notation. The final equation, W = wL, is the long run constraint that wages are driven to subsistence, w. Structural equations are very important to Academic Economists, but there is a problem. The Cybernetic Theory of Isomorphic Systems proves that structural equations are not unique if two systems have the same time path for the output variables. In other words, The graphics at the beginning of this post look alike but they were generated from two different systems. The first graphic is from a state space model (DEL19W model) and the second from Higgins Classical model.
When we are studying complex systems such as macroeconomies, we cannot hope to just speculate and specify structural equations. Economic systems are just two complex and the structural equations are unlikely to be unique, especially across countries. The Systems Theory argument is that the System State, which is unique to a given set of historical essential variables, must be estimated from system output data not theoretical speculations.
The role of the Capital Stock in understanding Capitalism is a case in point. One would think that the Capital stock would be critical to Capitalism and the ultimate Crisis of Capitalism. A little causal analysis will show it is just another output variable. First, the basic capital stock equation is K(t) = I - dK(t-1), that is, capital accumulates with Investment and becomes obsolete with depreciation, d. Since Investment comes out of Production, we have the causal diagram:
If, for example, 20% of output is devoted to investment, i=0.20, and if depreciation is 20 years, d=1/20=0.05. If we solve this model:
we get K = 0.21 Q. To get unending, unstable Capital accumulation with this simple model would require that i / (1-k) > 1.0 and it simply can't be given that i and k are proportions < 1.0 in value. So, if we want to get unending capital accumulation, we need to look elsewhere. In a slightly expanded model:
All the graphs above can produce the same behavior for Q. The Capital stock (K) can be reduced out of the system. The important coefficient for the behavior of the system is q3 on the Q self-loop. If it is greater than 1.0, the system is unstable (exponential growth forever). If the system is stable, an equilibrium steady state will eventually be reached in
the long-run when we are all dead. In other words, the steady state envisioned by Classical Economists can only result from stable economic systems, not systems that grow forever. And,
instability must be driven either by unstable Malthusian population growth, by endogenous technological change (the self-loop on Q) or by exogenous Technological change, T.
What this all says to me is that (1) the contribution of a steady state, unique to Classical Economics, requires stable technological change and stable population growth, (2) The major omission of Classical (and Neoclassical) Economics is a role for the World System (I'll address the inclusion of the World System in a future post) and, (3) The historical data in a given country have to be allowed to speak for themselves so we can uncover the actual controllers of the Economic System, which need not be the same in every country.
Classic References
These works are available on line: